As part of a team, I developed a modular motion planning and manipulation system for the FER Panda robotic arm to autonomously pick up and sort colored objects (“Turtles”) in both simulated and real laboratory environments. The system leverages ROS 2 and MoveIt for collision-aware motion planning, task execution, and real-time visualization.
Github Link: https://github.com/ncknight-un/Franka_Color_Sorting_MSR2025
School: Northwestern University
Location: - Evanston, IL
Duration: November 2025 - December 2025
Team Members:
Miguel Pigues: https://tmpegues.github.io
Halley Zhong: https://halleyscomet-99.github.io
Rishika Bera: https://rishika2024.github.io
Project Demo Vidoes:
Still Sorting Video Demo
Future Task Demo (Moving Sort)
Rviz Visualization
Color Vision
System Architecture
The system is built around a custom MotionPlanningInterface, composed of three core subsystems:
- RobotState – Maintains the robot’s current state
- MotionPlanner – Generates collision-free trajectories
- PlanningScene – Represents the environment and obstacles
These components integrate through MoveIt to produce safe and efficient motion plans while accounting for static obstacles.
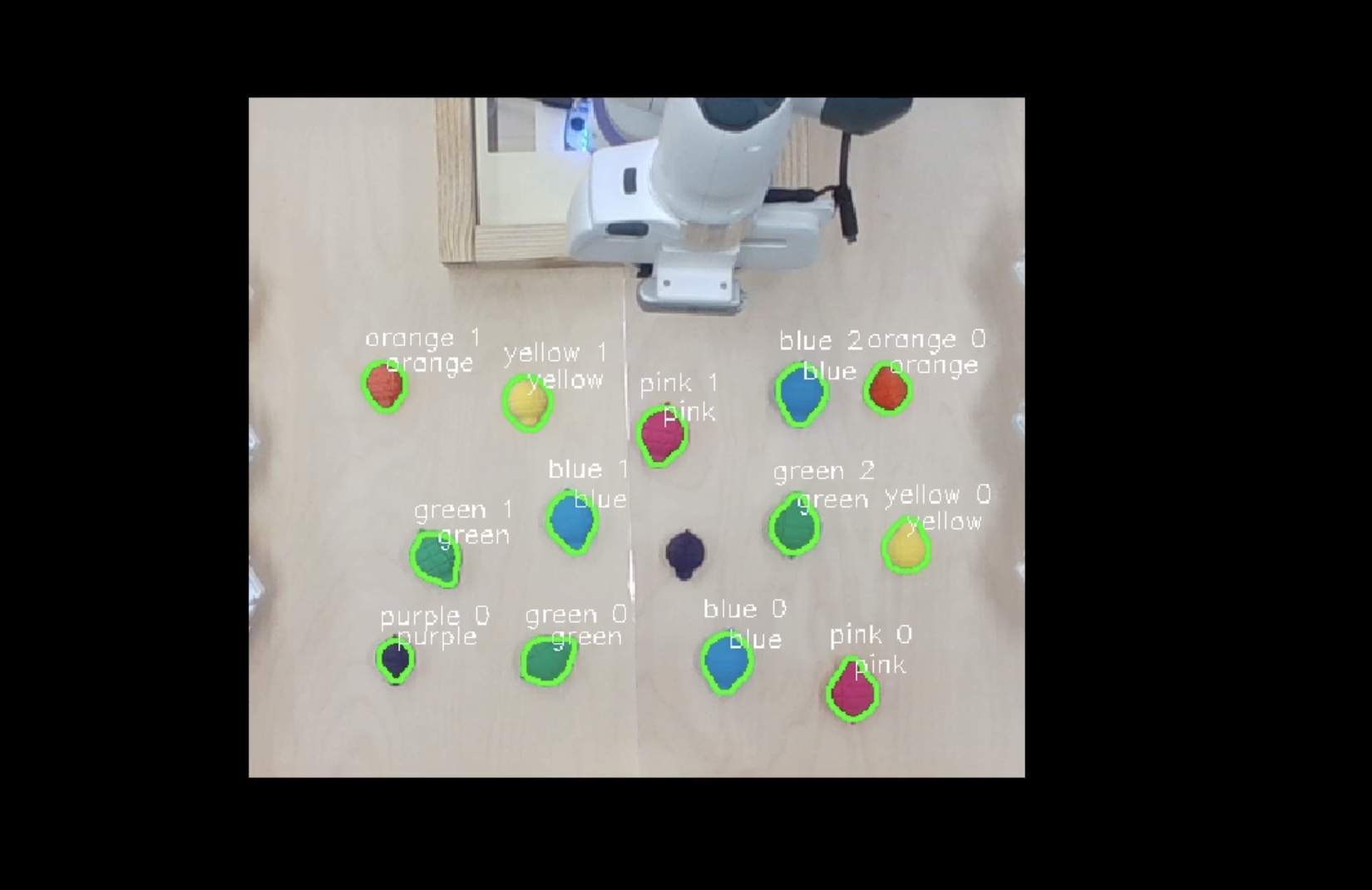
Perception & Visualization
- Object detection is integrated into the pipeline using vision-based inputs
- Detected colored objects are visualized in RViz in real time
- The active target is highlighted for clarity during execution
Task Planning & Execution
The system includes higher-level coordination through:
- TargetDecision Node – Identifies and selects objects to retrieve
- Sort Node – Assigns placement locations and executes sorting logic
This structure enables:
- Clear separation between perception, planning, and execution
- Flexible and modular task sequencing
Dynamic Object Tracking (Extension Work)
An extended feature explores real-time sorting of moving objects using Hexbug-powered turtles.
- Implemented a low-latency control pathway via
fer_arm_controller - Bypasses MoveIt to directly command joint trajectories
- Enables continuous tracking of dynamic targets
This significantly increases system complexity, as the non-linear motion of the turtles introduces challenges in prediction and control. This area remains under active development.
Enclosure & CAD Designs:
- Designed the enclosure in Fusion360 to plan layout prior to construction, ensuring alignment with the robot workspace
- Migeul Pegues Created a custom insert to ensure repeatable placement of the fixture between the robot base and frame
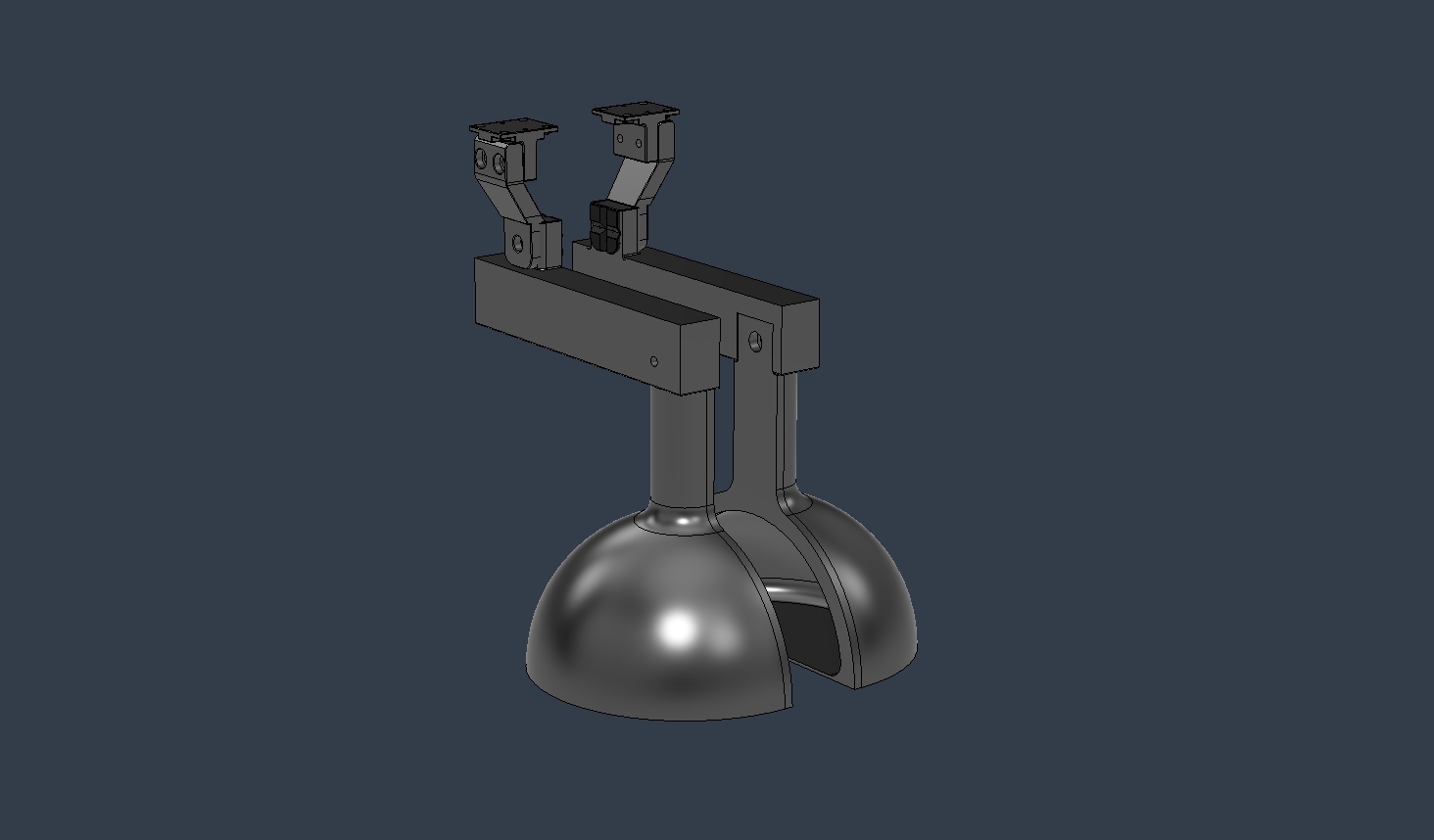
- Designed a custom gripper to securely grasp round shells while avoiding collisions with the ground frame
- Added rounded corners to improve safety and prevent corner trappong during operation
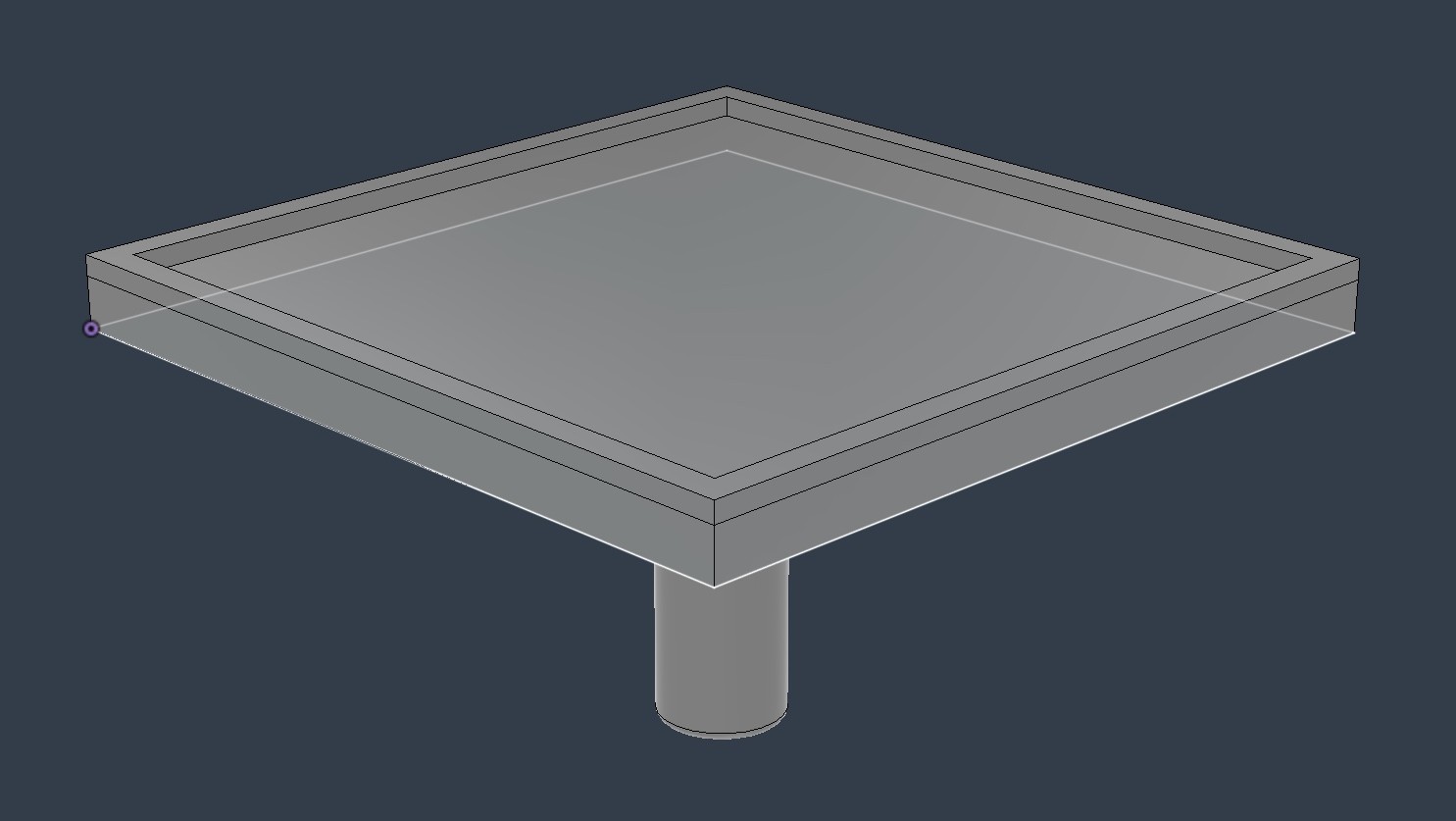
- Integrated mounted AprilTag holders to ensure consistent perception and repeatable testing conditions
Note: I have shared all CAD files to this public repository! Feel free to build off of them!
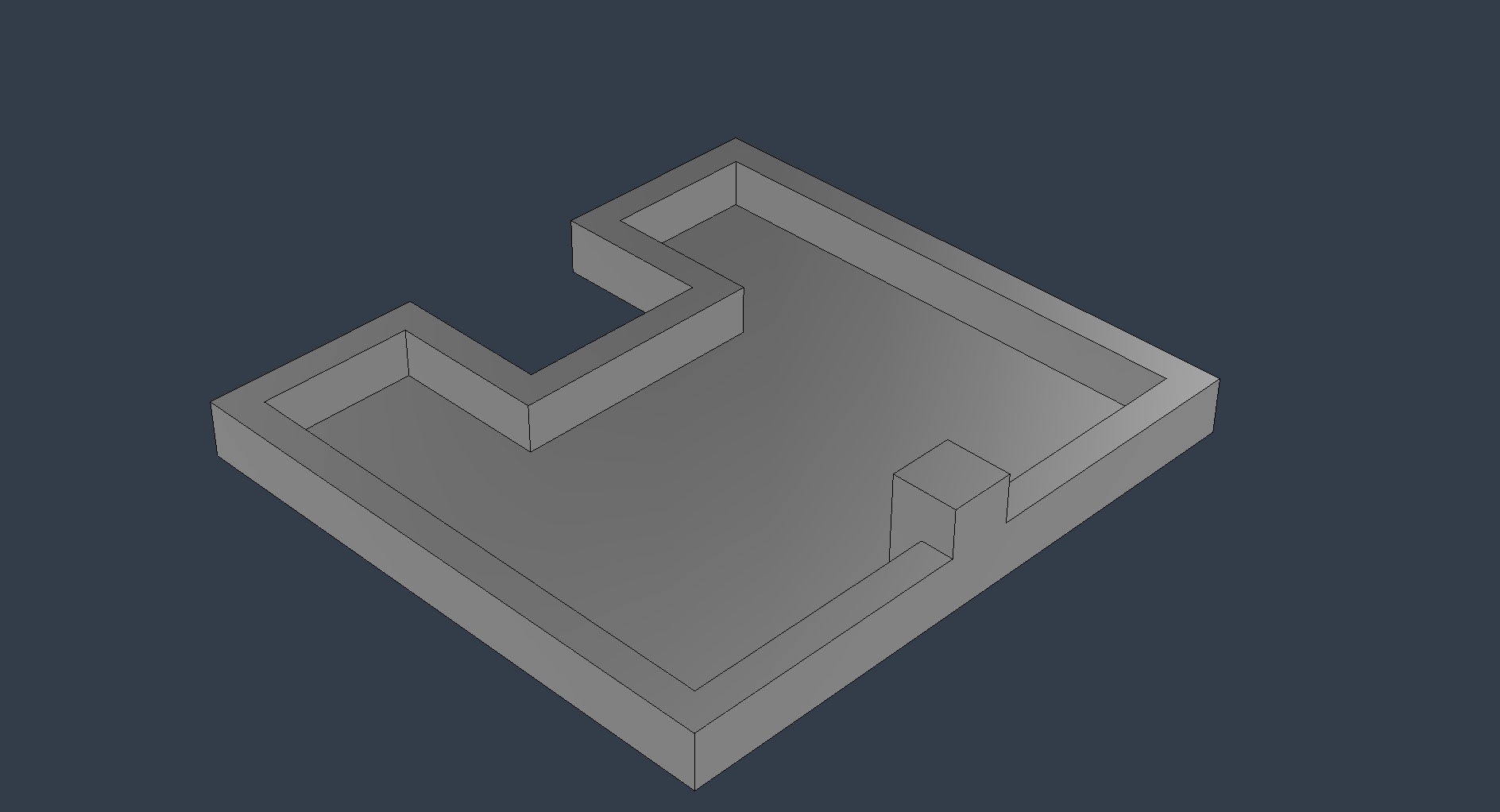
World Model (PreBuild)
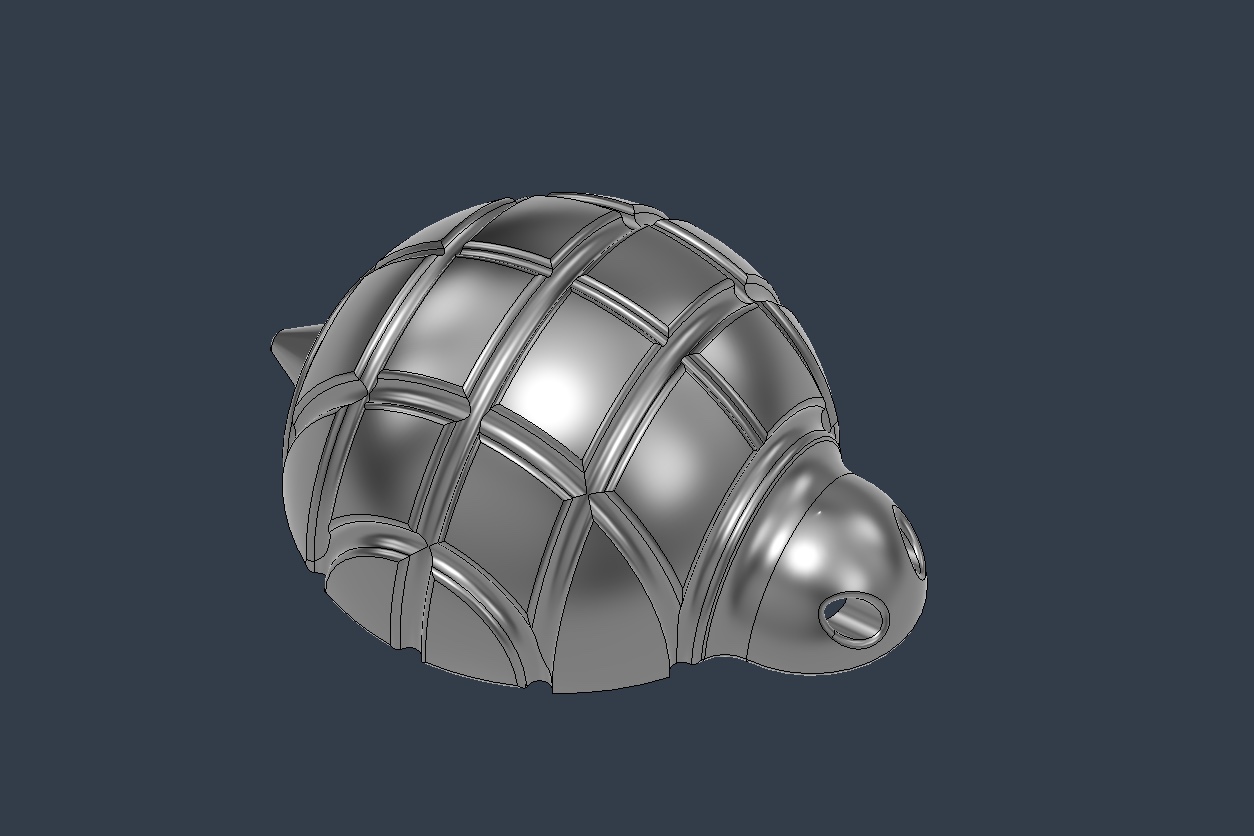
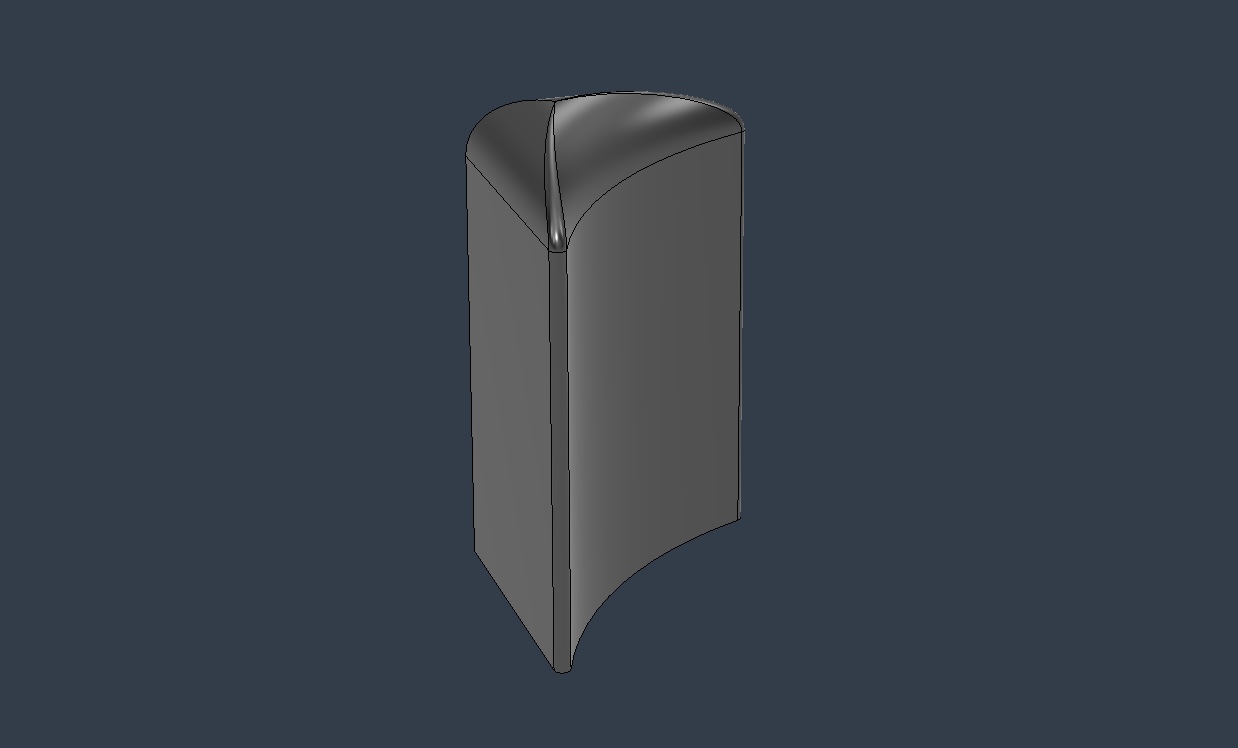
Hexbug Turtle Shell
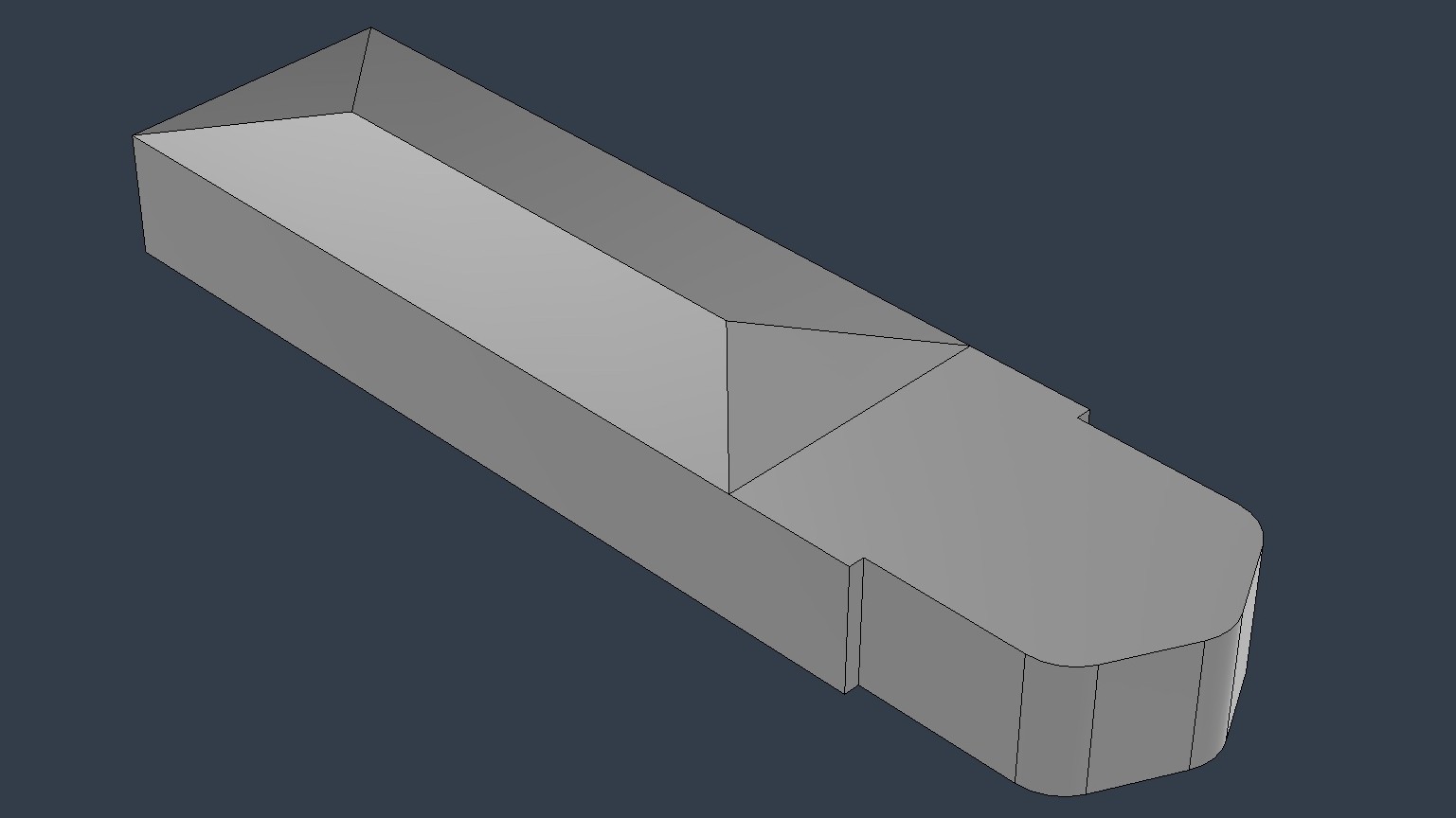
Hexbug Positive
Custom Grippers for FER
World Corners
April Tag Base
Skills Improved:
- ROS 2 (nodes, topics/services, launch files)
- MoveIt (motion planning and collision avoidance)
- Robotic manipulation (Franka Emika Panda)
- Motion planning and environment modeling
- Vision-based object detection and task execution
- Real-time visualization (RViz)
- Modular robotics system design
- Joint trajectory control for dynamic tracking
- Integrated perception, planning, and control
Key Takeaway:
This experience allowed me to develop a complete, end-to-end robotic manipulation system that integrates perception, motion planning, and control. I gained practical experience designing modular ROS 2 architectures, working with both collision-aware planning and real-time control for dynamic targets, and debugging complex robotic behaviors in simulation and on physical hardware. Most importantly, the project strengthened my ability to translate high-level task goals into reliable, autonomous robotic actions in real-world environments.